MegaPirateXсистема управления летающими моделями Разработчик системы: © Syberian Сборка "железа": © Dundel1 |
Открыт новый сайт проектаMegaPirateX |
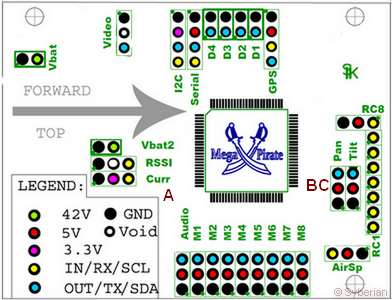
Новая версия платы СУ!Селектор синхроимпульсов видео выполнен на LM1881.Напряжение с входа Vbat2 тоже используется для питания платы.
Основная плата MegaPirateX (MPX)На плате установлены:
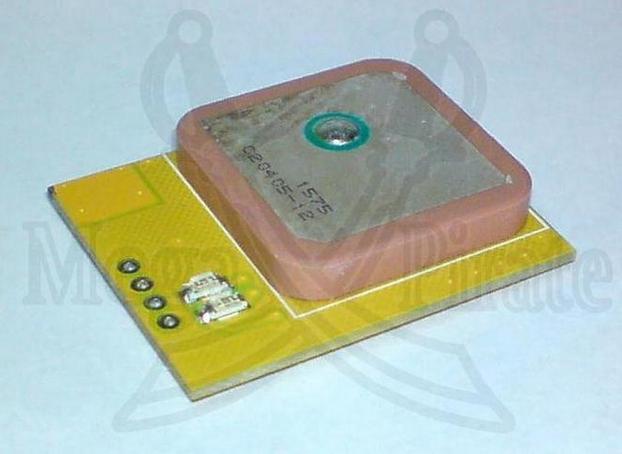
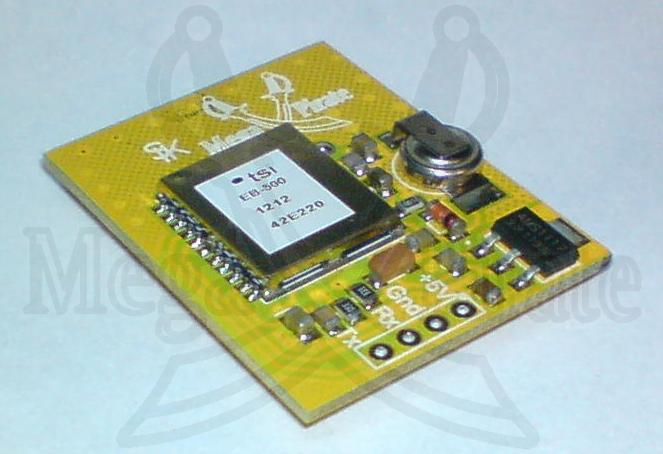
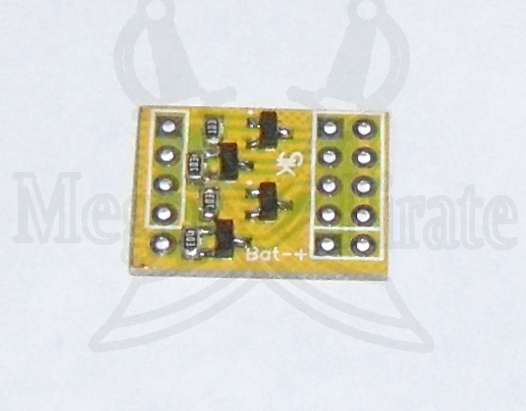
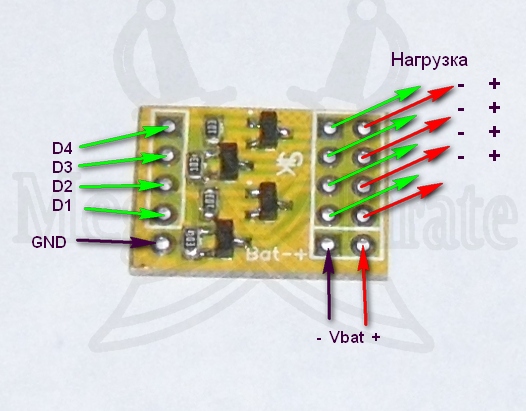
-контроллер STM32F407 -набор 3-х осевых МЕМС-датчиков: -гироскоп ITG3205 -акселерометр BMA180 -компас HMC5883 -барометр BMP085 -импульсный стабилизатор 5V (питание контроллера и датчиков) -линейный стабилизатор 3,3V (питание контроллера и датчиков) -EEPROM AT24C64 Назначение разъёмов: (в скобках указаны допустимые диапазоны напряжений на соответствующих выводах) Входы: -Vbat — контроль напряжения силовой батареи 2S-8S LiPo и питание основной схемы (7,2-32В) -Vbat2 — контроль напряжения дополнительной батареи (видео) 2S-10S LiPo (7,2-40В) и питание основной схемы. -RSSI — RSSI с приёмника РУ -Curr – сигнал с выхода датчика тока (0- +3V) -AirSp – сигнал с выхода датчика воздушной скорости (0- +5V) -RC1-RC8 — управляющие сигналы с приёмника РУ (0- +5V, питание +5V на приёмник подаётся от регулятора оборотов через RC8 ) -GPS – сигнал с выхода GPS-приёмника (0- +3,3V) -Serial – COM-порт для подключения адаптера USB-UART или беспроводного модуля связи с компьютером (0- +5V) -I2C — вход-выход для подключения внешних устройств по протоколу I2C (0- +3,3V) -Video — вход-выход видеосигнала ОСД Выходы: -Audio — подключение к аудиовходу видеопередатчика, для передачи на землю речевых сообщений -M1-M8 – подключение рулевых машинок (регуляторов оборотов для мультикоптеров) -Pan, Tilt – управление подвесом камеры (они же М9, М10) -D1-D4 — управление БАНО (0- +3,3V) (ВНИМАНИЕ! Не рекомендуется подключение светодиодов непосредственно на выходы, желательно использование силовых ключей!)
Светодиоды:
- мигает 1 раз в секунду - система исправна, в рабочем состоянии, двигатели не активированы. - горит постоянно - система в рабочем состоянии, двигатели активированы, готовы к запуску
- не горит - GPS-приёмник не подключен - часто мигает - GPS-приёмник подключен, координаты не зафиксированы - горит постоянно - GPS-приёмник подключен, координаты определены.
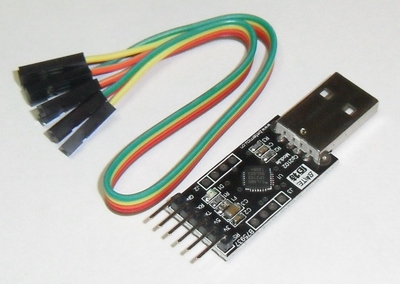
Все выходы имеют защиту от перегрузки по току. Питание контроллера и датчиков осуществляется от ходовой батареи (Vbat) или дополнительной батареи (Vbat2) через импульсный стабилизатор, и дополнительно от ВЕС регулятора оборотов двигателя. При подключении к компьютеру через прилагаемый адаптер USB-UART на контроллер и датчики подаётся питание от адаптера. Питание на рулевые машинки, а также на приёмник РУ, подаётся независимо от основной схемы, с встроенных ВЕС регуляторов оборотов, или отдельного ВЕС, подключенного на любой из разъёмов М1-М10. При этом автоматически подаётся питание и на основную схему.
Размеры: 66х51х18мм. Вес: 28гр. Диапазон рабочих температур: 0°С - +40°С Варианты комплектации:
|
|


© shum27 |